05. LiDAR 数据
LiDAR 传感器数据
LiDAR 代表光检测和测距,它是一种使用光(激光),来测量自身与反射光线的物体之间距离的传感器。其任务原理是通过发送一系列激光脉冲,并测量物体将光线反射回传感器的时间来实现的。反射需要的时间越长,距离传感器越远。在这个意义上,LiDAR 是 空间相干 数据,并被用来创建一个视觉世界的表示。
下面,你可以看到 Voyage 使用的 LiDAR 的输出,它会发出光脉冲,并检测汽车的周围环境。
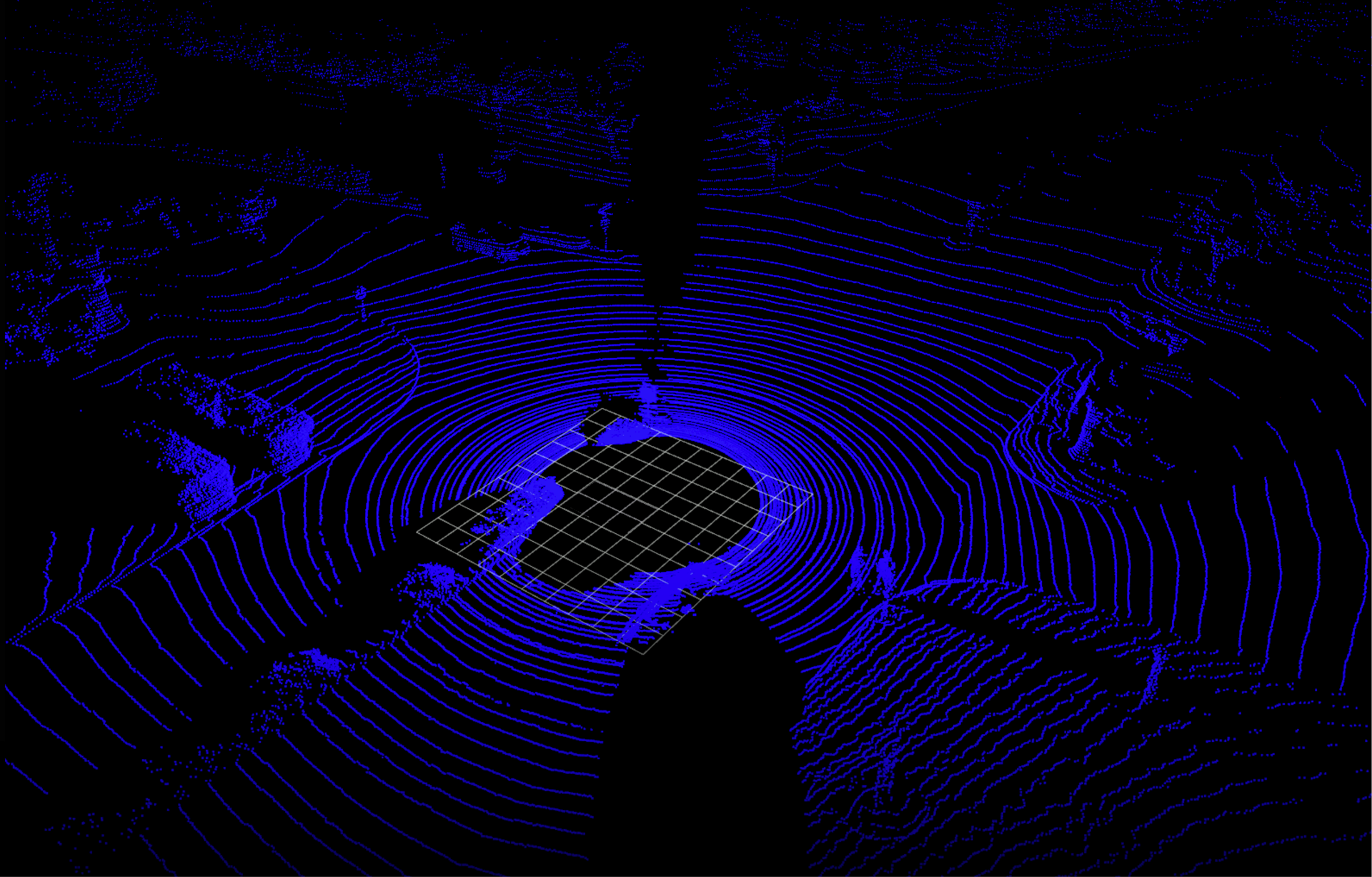
LiDAR 传感器输出。蓝色表示检测到的靠近点,中心的网格是无人驾驶车在场景中占据的空间。
点云
由于 LiDAR 使用发出细光束的激光,所收集的数据最终成为许多单点,也称为 点云 。这些点云可以告诉我们,很多关于物体的形状和表面纹理的信息。通过聚集这些点云并分析它们,这些数据提供了足够的信息,来分类对象或随着时间的推移跟踪一组点云。
下面,你可以看到在这些点上执行的分类算法的结果。红色表示行人,绿色表示其他车。
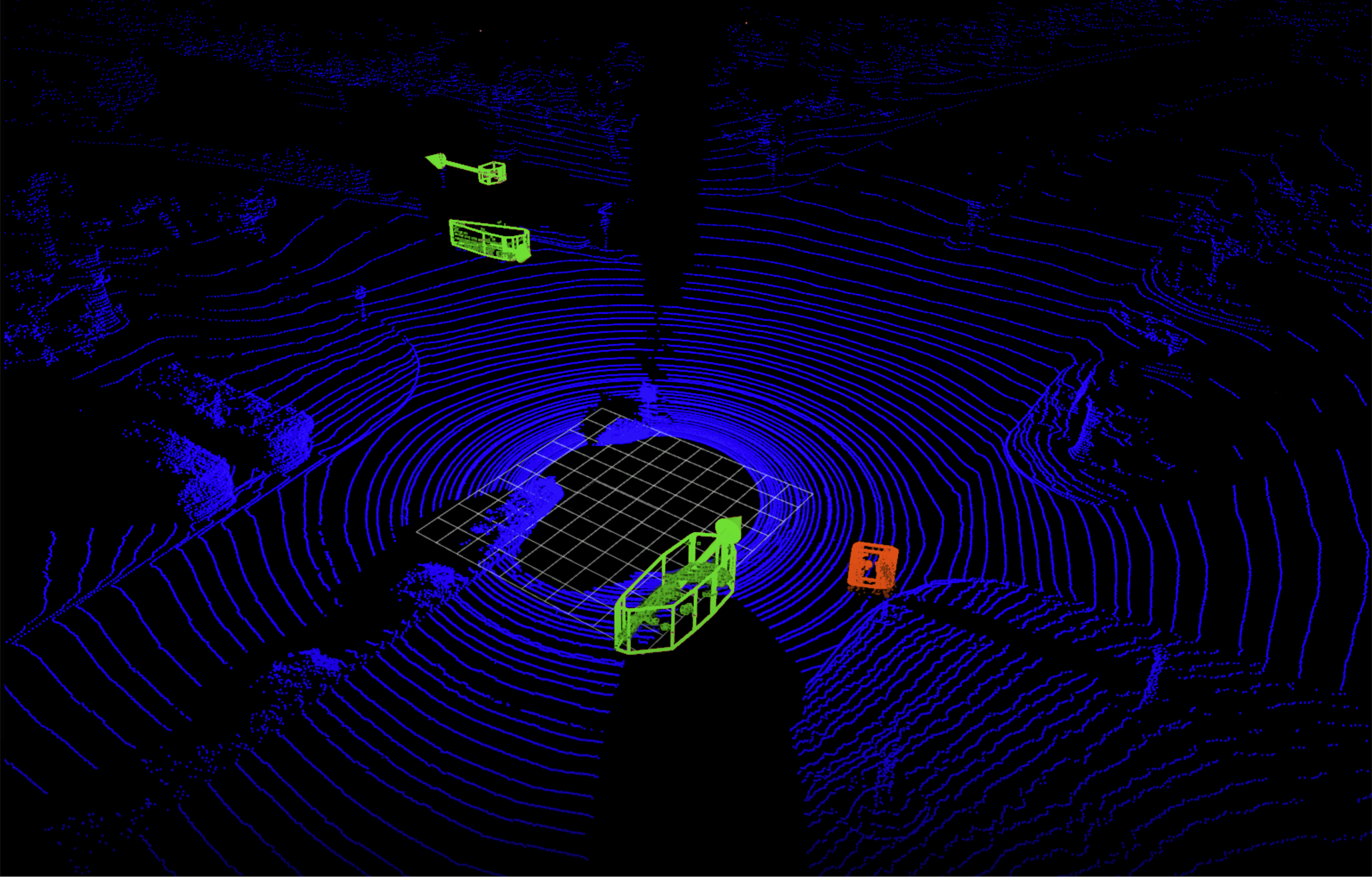
相同的 LiDAR 数据通过分类器聚集在一起,并将它们分类为具有一定速度的人(红色)或汽车(绿色)。
## 视觉世界
正如你所看到的,LiDAR 数据提供了足够的空间信息来创建一个视觉世界,在行业中,不仅可以使用相机图像,还可以使用点云和其他类型的空间相关数据,运用视觉技术来对物体进行分类。